- Équipement:
- caméra avec illuminateur IR pour l’emploi de jour et de nuit
- deux lasers,
- interrupteur de sécurité,
- poids:[kg]: 2,1
- dimensions [cm] 12-20 (largeur) x 14 (hauteur) x 11 (longueur)
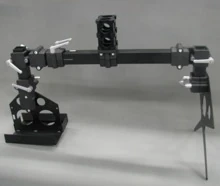
 permet le montage du fusil type Benelli M4 Super 90
permet le montage du fusil type Benelli M4 Super 90- munie d’un viseur laser, accouplements d’accessoires et interrupteur de sécurité
- matériaux: acier et aluminium
- poids [ kg]: 3
- dimensions : [cm] : 68 (longueur) x 24 (hauteur) x 10,5 (largeur)
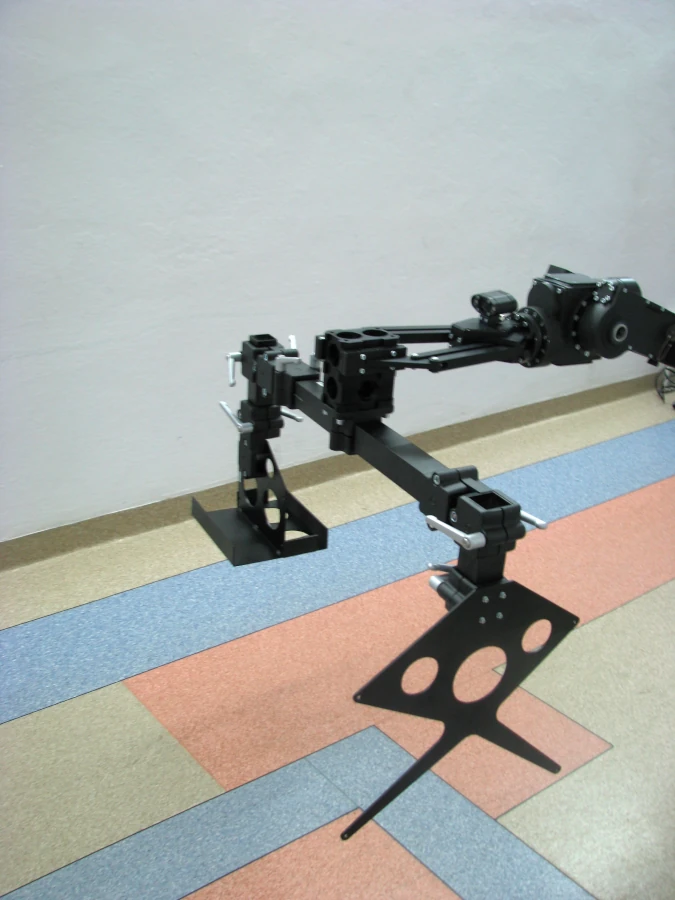
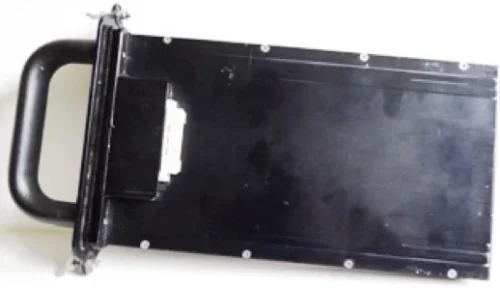
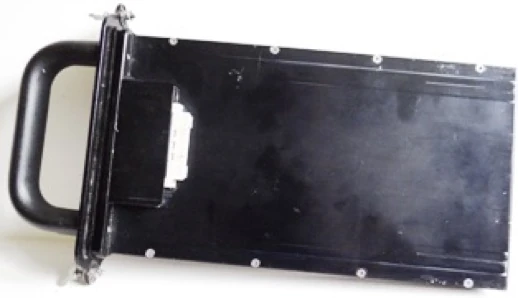
 le robot peut coopérer avec appareil à rayons X composé d’un dispositif générateur de rayons X et d’un écran. Ce dispositif doit être installé dans le support.
le robot peut coopérer avec appareil à rayons X composé d’un dispositif générateur de rayons X et d’un écran. Ce dispositif doit être installé dans le support.- support pour le dispositif générateur de rayons X est composé de:
- support pour le serrage dans les mâchoires de préhension
- flèche télescopique
- support d’écran
- support du générateur de rayons X
![]()
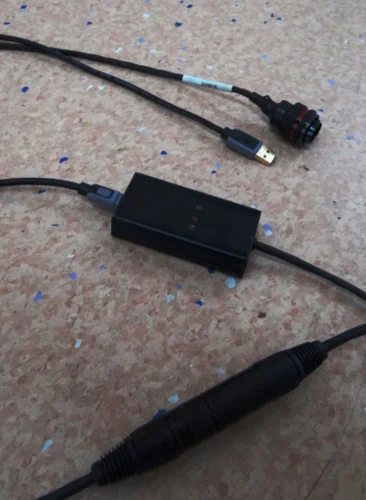
- compatible avec le capteur AP2C




- permet le contrôle du robot en absence de communication radio
- indispensable pour connecter le répéteur
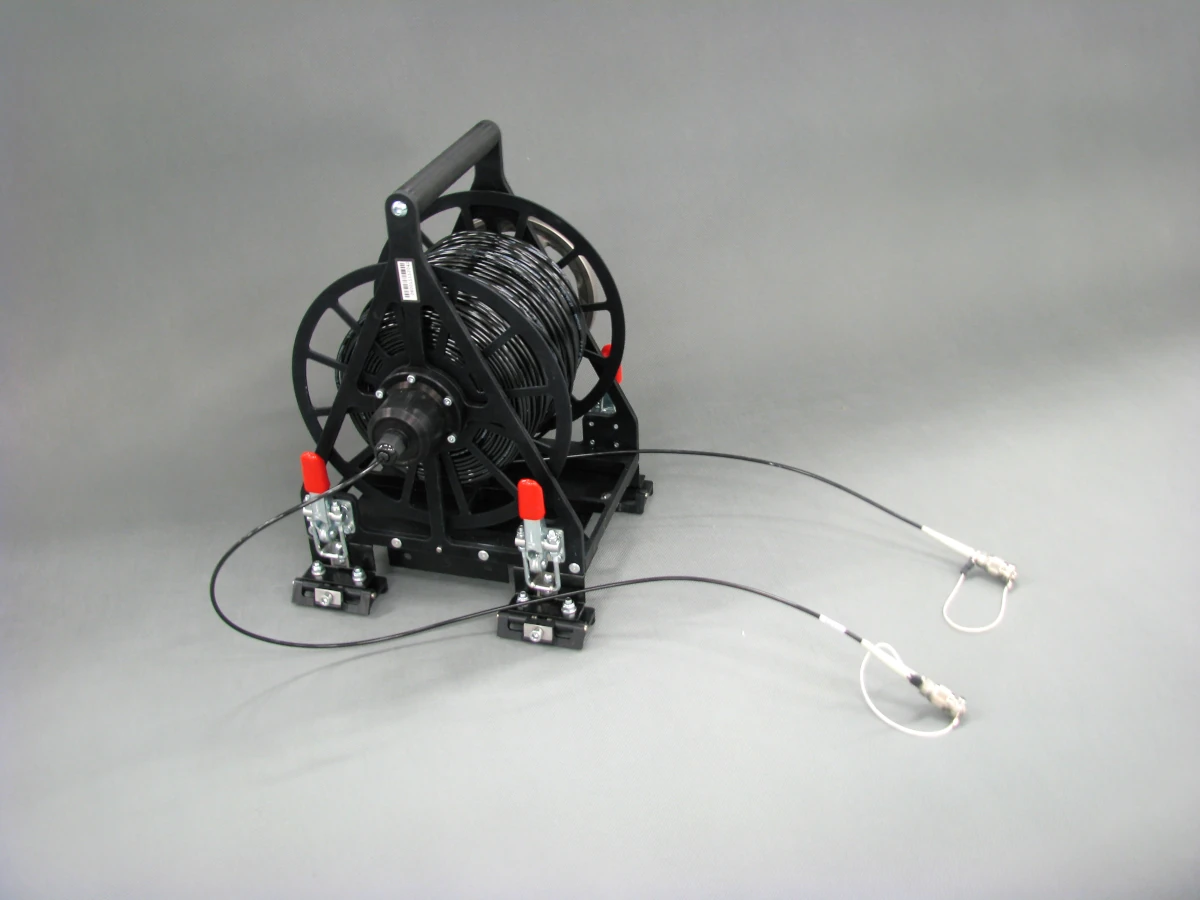
- l’enrouleur manuel de câble à fibre optique se compose de:
- Châssis
- Manivelle
- Câble à fibre optique court
- Câble à fibre optique long (enroulé sur le tambour)
- Pattes de fixation au rail RIS
- poids [kg]: 3.1
- dimensions : [cm] : 21 (longueur) x 25 (largeur) x 28 (hauteur)
- paramètres techniques de fibre optique:
- rayon de courbure minimum: 25mm
- force de traction maximale: 300N (30.5 kg)
- longueurs disponibles: [m]: 150, 300
 permet le contrôle du robot en l’absence de communication radio
permet le contrôle du robot en l’absence de communication radio- longueur du câble : jusqu’à 300 m
- poids [kg]: 6.15
- dimensions : [cm] : 28 (longueur) x 23 (largeur) x 24 (hauteur)

 pour la détonation à distance des explosifs
pour la détonation à distance des explosifs
 permet d’augmenter la portée de la communication radio lors du contrôle à partir de véhicules ou de locaux
permet d’augmenter la portée de la communication radio lors du contrôle à partir de véhicules ou de locaux
 robot adapté pour travailler avec un kit de négociation composé de:
robot adapté pour travailler avec un kit de négociation composé de:
deux microphones et un haut-parleur installés sur une base mobile et d’un microphone connecté au panneau de commande- kit de négociations doit être commandé par câble à fibre optique

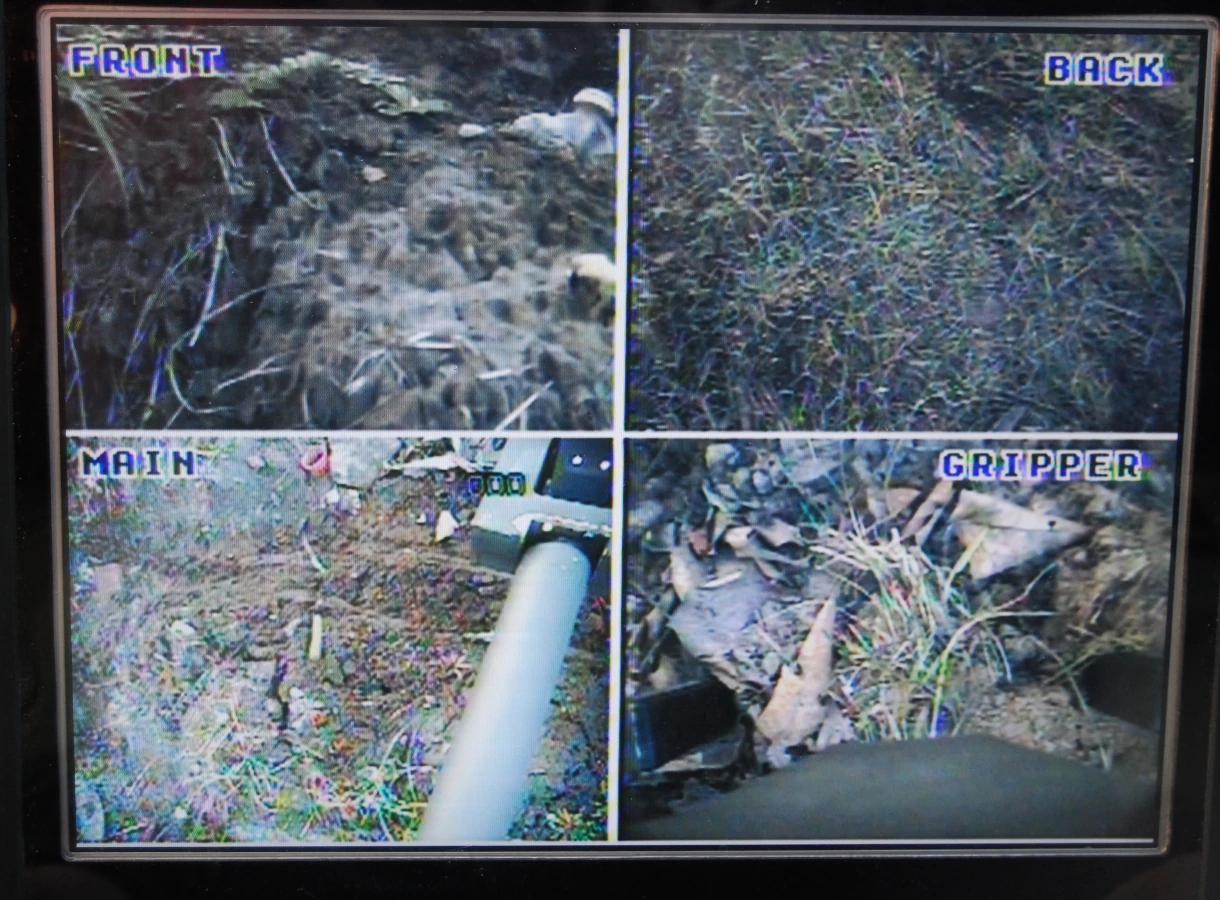
 Enregistreur numérique pour l’enregistrement d’images obtenues à partir du robot
Enregistreur numérique pour l’enregistrement d’images obtenues à partir du robot


 petit panneau de commande permet de contrôler le robot
petit panneau de commande permet de contrôler le robot- une batterie intérieure (chargeur 230 V)
- poids [kg]: 0.43
- dimension [cm] : 16,5 (longueur) x 11 (largeur) x 3,5 [+3,5 joysticks] (hauteur)
- portée [m] : 10 (en espace ouvert)
- temps de travail : 1 heure environ minimum

 batterie supplémentaire pour le panneau de commande
batterie supplémentaire pour le panneau de commande
- batterie supplémentaire pour la base mobile
- permet un fonctionnement continu du poste de l’opérateur lors de la connexion à l’alimentation
 augmente deux fois les possibilités opérationnelles du robot
augmente deux fois les possibilités opérationnelles du robot- nécessite la connexion d’un câble à fibre optique ou un enrouleur passif de câble à fibre optique

 brise-vitre travaille automatiquement et n’a pas besoin d’autres opérations d’entretien
brise-vitre travaille automatiquement et n’a pas besoin d’autres opérations d’entretien- brise-vitre est composé d’une pointe en carbure cémenté et d’un système du marteau intérieur. Collier de fixation permet la prise du brise-vitre par les mâchoires de préhension
 Écouvillon de prélèvement environnemental
Écouvillon de prélèvement environnemental- Échantillonneur de surface
- Kit d’échantillonneurs médico-légaux
- Adsorbeur SPME
- Capteur-R (EKO-C intégré)

 Casser des vitres, percer les trous dans les surfaces, forcer les serrures et briser d’autres petits éléments (principe de « sonnette de battage »)
Casser des vitres, percer les trous dans les surfaces, forcer les serrures et briser d’autres petits éléments (principe de « sonnette de battage »)- Percer différents objets (p.ex. des pneus)
- Couper les charnières
- Couper les barres métalliques, des fils ou des câbles, des chaînes et des tubes
- Couper des éléments
- Amorcer des cordeaux détonants non électriques de systèmes détonants comme STS, NDS, NONEL
- Jeu d’embouts (outils) de travail:
- cisailles pour couper les câbles, fils, et barres métalliques;
- brise-vitres et d’autres objets;
- perforateurs;
- déclencheurs pour initier une explosion à l’aide de systèmes non électriques de détonation
- couteaux racleurs
- possibilité de programmer les embouts de travail sur commande spécifique de l’utilisateur

 destiné à identifier les erreurs et les pannes du robot
destiné à identifier les erreurs et les pannes du robot- pour changer les paramètres et configurations du robot
- interface d’accessoires et SVGA

 permet une vision nocturne
permet une vision nocturne- est fixée à côté du caméra des mâchoires de préhension
- est alimentée par le robot
- dispose d’une fonction de déconnection à distance après le changement du plan de vue de caméra
- dimensions [cm] : 20 (longueur) x 9 (hauteur) x ? (largeur)
- corde de remorquage avec crochet